Outline¶
- What problems am I trying to solve?
- Phase transition difficulties
- Rephrase our equations
- The classical pendulum
- Plugging autoencoders into equations
- Unsupervised learning for phases
- Batch training and testing of simulations
What kinds of problems?¶
Single phase Darcy's law is easy:
\begin{equation} M \partial_t p = \nabla \cdot \frac{k}{\mu} \nabla p \end{equation}What kinds of problems?¶
- Multicomponent mass and heat transfer
- Big ranges in our problems: depths, temperature fluxes, chemical compositions, percipates...
Multiphase Transport Equations¶
Mass balances and energy balance:
\begin{align} \partial_t \rho_{H_2O} & = \nabla \cdot \frac{k_1(p,T)}{\mu} \nabla p \\ \partial_t \rho_{CO_2} & = \nabla \cdot \frac{k_2(p,T)}{\mu} \nabla p \\ \partial_t \rho_{CH_4} & = \nabla \cdot \frac{k_3(p,T)}{\mu} \nabla p \\ \partial_t \sum \rho u & = \nabla \cdot q \end{align}- Complicated equations and empirical fits for everything
- Mass fraction and multiple phases for each material:
(Not shown: continuum mechanics and chemical reactions!)
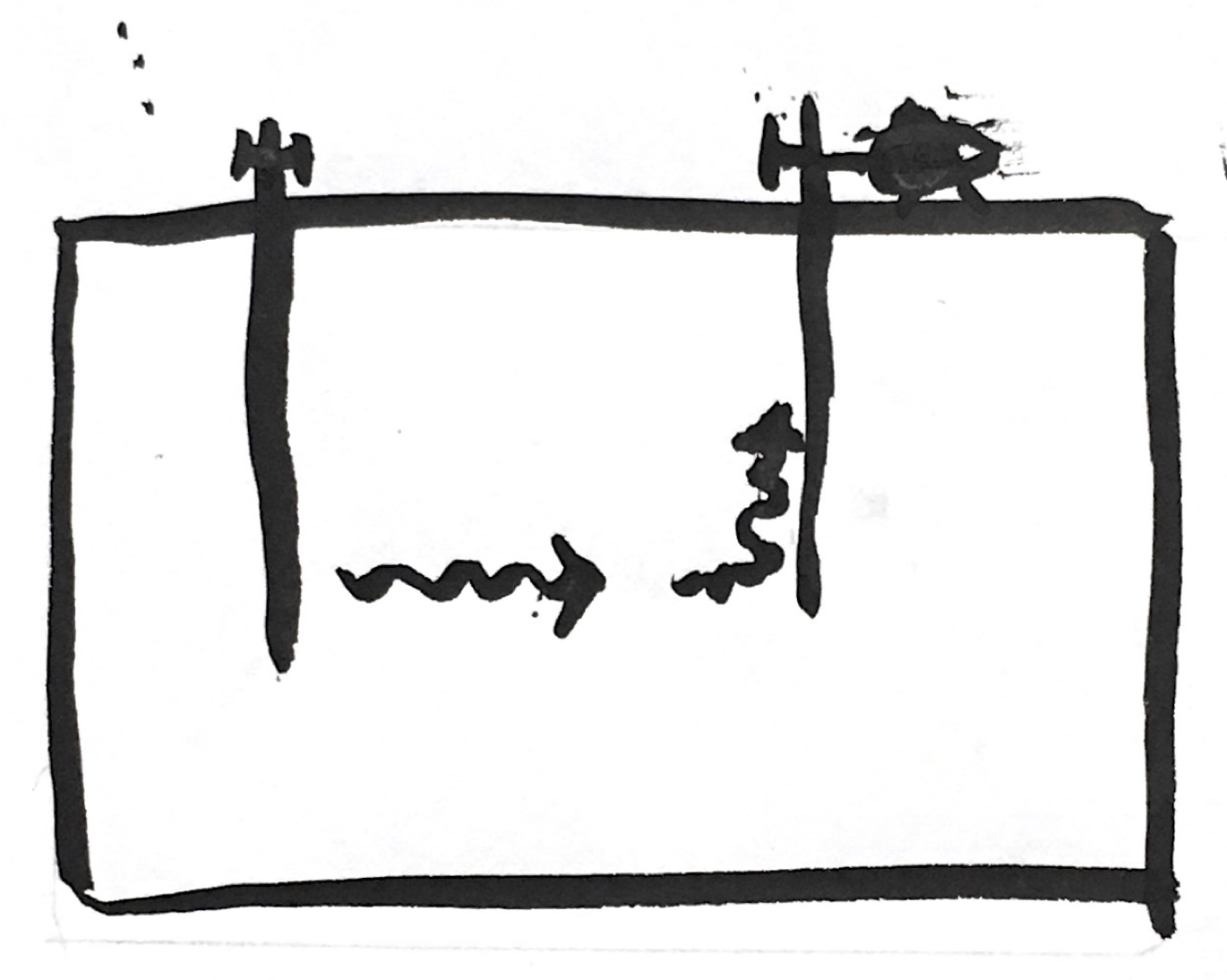
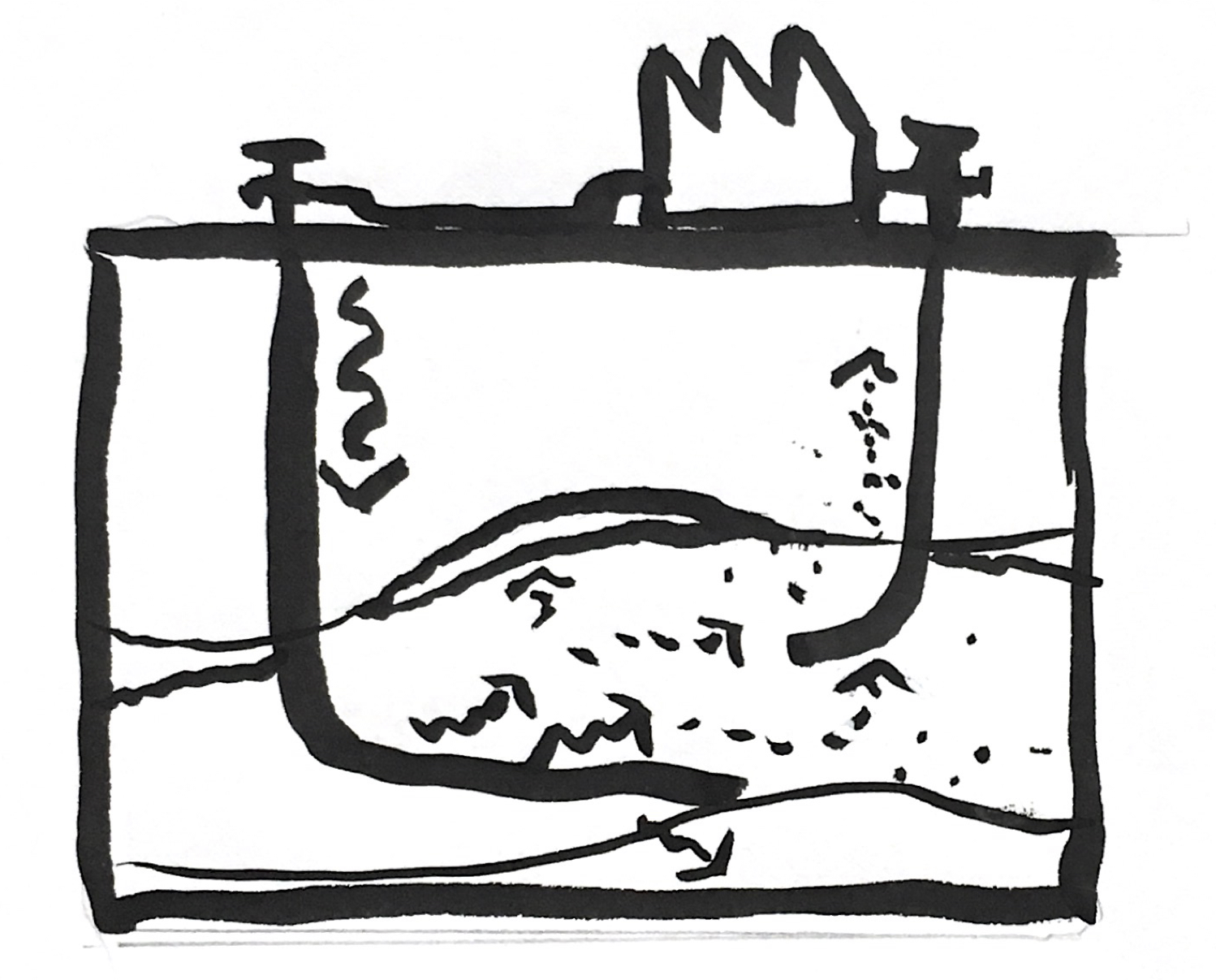
Multiphase representation is the hard part¶
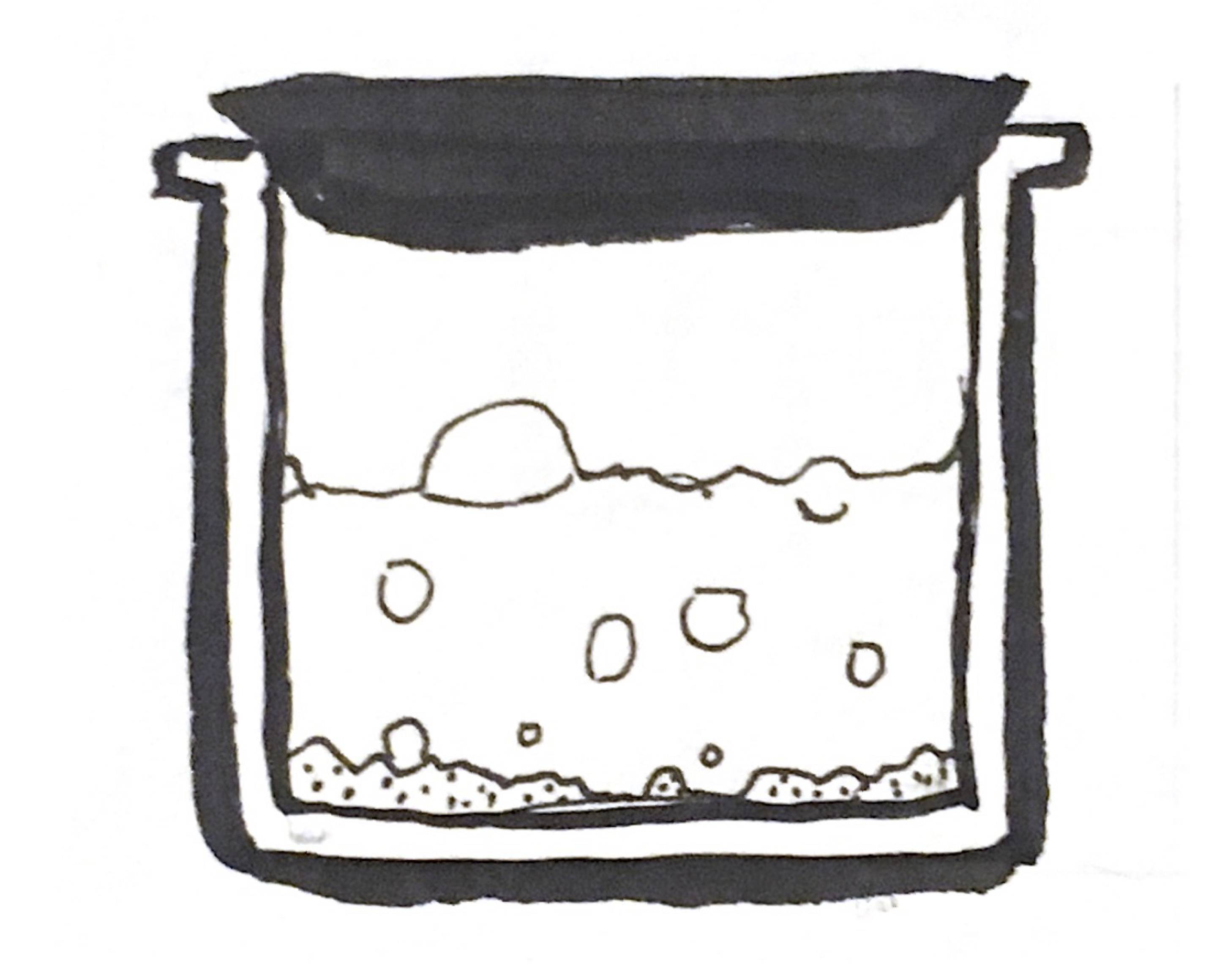
First steps: homogenized beaker with pure water
- Transition between phases
- Equilibria with coexisting phases
- Compositional changes
How do we represent and solve this?
What is a phase?¶
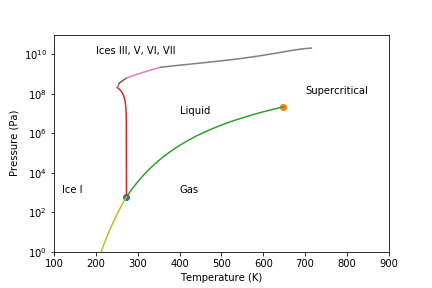
Phase diagram of water
- Human object recognition distinguishes phases
- Sudden changes in material properties
Phase transitions occur when the thermodynamic free energy of a system is non-analytic for some choice of thermodynamic variables (cf. phases).
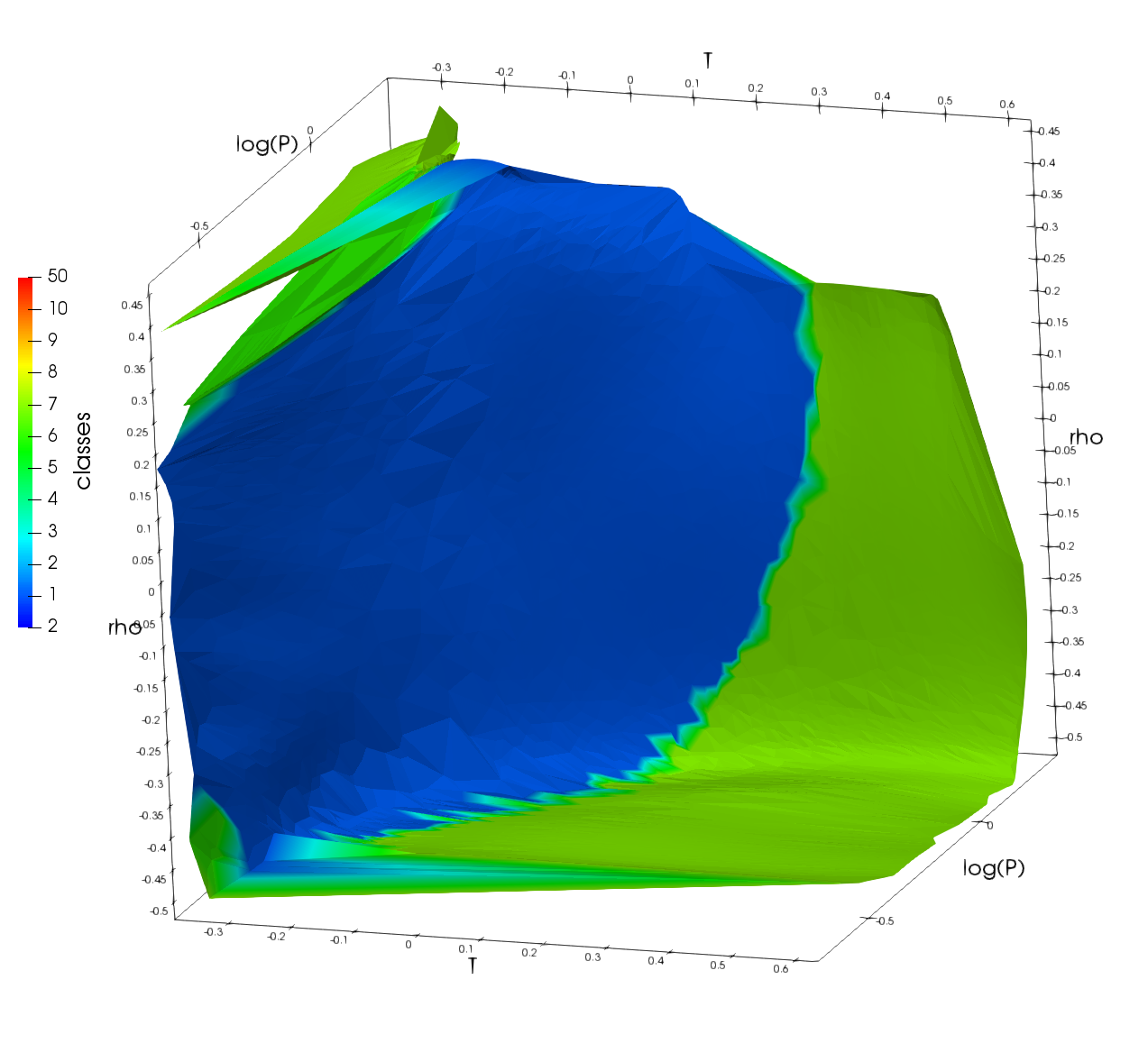
Water EOS¶
from IPython.display import IFrame
IFrame('figures/water_eos.html',width=700,height=500)
Used IAPWS empirical fits to make this data set. Colored by phase, including mixtures.
Water EOS¶
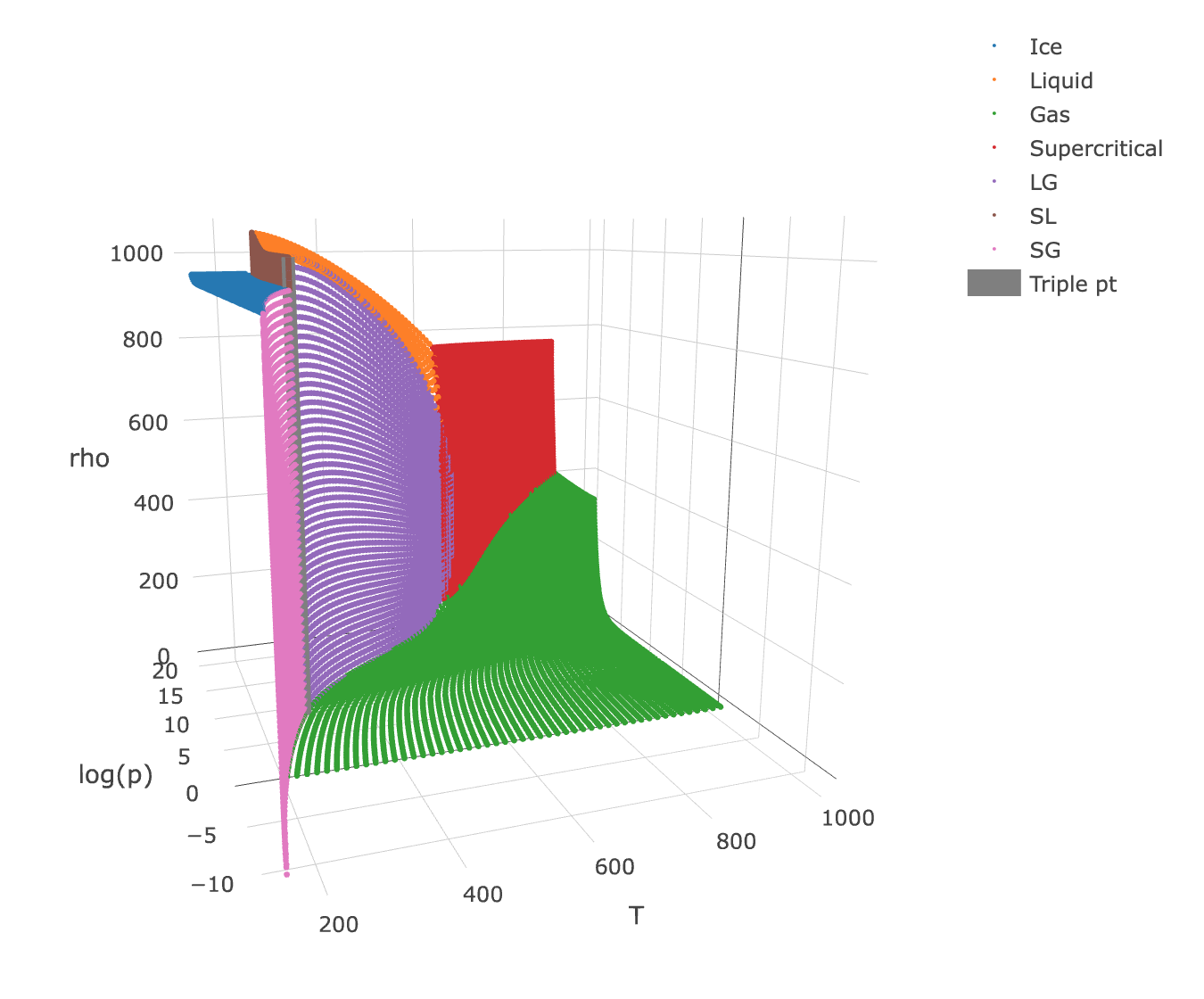 Used IAPWS empirical fits to make this data set. Colored by phase, including mixtures.
Used IAPWS empirical fits to make this data set. Colored by phase, including mixtures.
Curve fits are complicated (and arbitrary):¶
def gibbs_liquid_h2o(T,p): # From IAPWS '97
p1_star = 1.653e7
T1_star = 1.386e3
n1 = [ 0.14632971213167e00, -0.84548187169114e00,
-3.7563603672040e+00, 3.3855169168385e+00,
-0.95791963387872e00, 0.15772038513228e00,
-1.6616417199501e-02, 8.1214629983568e-04,
2.8319080123804e-04, -6.0706301565874e-04,
-1.8990068218419e-02, -3.2529748770505e-02,
-2.1841717175414e-02, -5.2838357969930e-05,
-4.7184321073267e-04, -3.0001780793026e-04,
4.7661393906987e-05, -4.4141845330846e-06,
-7.2694996297594e-16, -3.1679644845054e-05,
-2.8270797985312e-06, -8.5205128120103e-10,
-2.2425281908000e-06, -6.5171222895601e-07,
-1.4341729937924e-13, -4.0516996860117e-07,
-1.2734301741641e-09, -1.7424871230634e-10,
-6.8762131295531e-19, 1.4478307828521e-20,
2.6335781662795e-23, -1.1947622640071e-23,
1.8228094581404e-24, -9.3537087292458e-26 ]
i1 = [ 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1,
1, 2, 2, 2, 2, 2, 3, 3, 3, 4, 4, 4, 5,
8, 8, 21, 23, 29, 30, 31, 32 ]
j1 = [ -2, -1, 0, 1, 2, 3, 4, 5, -9, -7, -1, 0, 1,
3, -3, 0, 1, 3, 17, -4, 0, 6, -5, -2, 10, -8,
-11, -6, -29, -31, -38, -39, -40, -41 ]
p_i = p/p1_star
t_i = T1_star/T
return R*T*sum([ n*(7.1-p_i)**I*(t_i-1.222)**J
for n,I,J in zip(n1,i1,j1)])
density_region1,enthalpy_region1 = density_enthalpy(gibbs_region1)
How do we solve this? State Machines¶
Gridblocks have two unknowns X1 X2 and an additional phase tag.
- Gas: $X = \{p,T\}$
$\rho_{gas}(p,T) = $ one fit - Liquid: $X = \{p,T\}$
$\rho_{liq}(p,T) = $ another fit - Liq-Gas: $X = \{S_{gas},T\}$
$\rho_{mix}(S,T) = S \rho_{gas}(p^*(T),T)+ (1-S) \rho_{liq}(p^*(T),T)$

- Need potentially different variables for each state
- Equilibria usually use a phase saturation $S$
- Need logic to handle state of the material
- Limits discretization choice
State machine for phase transitions:¶
Formulate balance equations as \begin{equation} R(X ; phase) = 0 \end{equation} Solve the differentiable part: \begin{equation} \frac{\partial R}{\partial X}\Delta X^{k+1/2} = -R(X^k ; phase^k) \end{equation} and iterate on the nondifferential part: \begin{equation} phase^{k+1},X^{k+1} = statemachine(X^{k+1/2} ; phase^k) \end{equation}
switch phase_old:
case gas:
if p,T crossing boundary:
phase_new = liquid_gas
case liquid:
if p,T crossing boundary:
phase_new = liquid_gas
case liquid_gas:
if S_gas >= 1:
phase_new = gas
if S_liquid >= 1:
phase_new = gas
- No quadratic convergence
- Lots of bug ridden coding!
- Easily unstable! Need a lot of hacks, like overshoots: \begin{equation} p_{new} = (1+10^{-6})p_{old} \end{equation}
It gets combinatorially more complex:¶
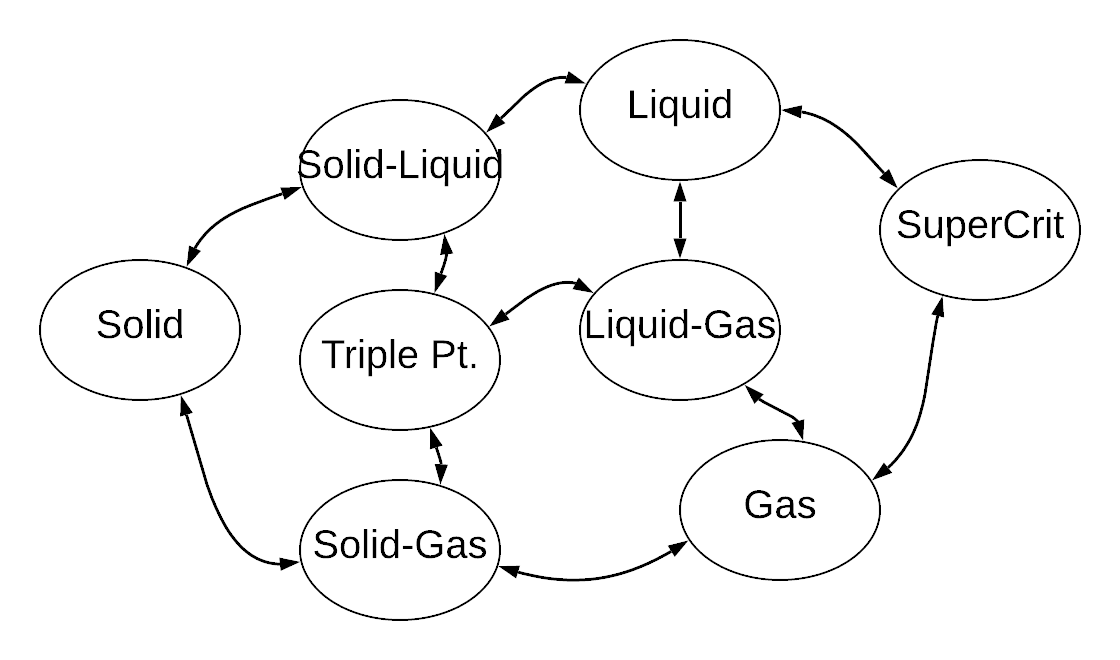
- 8 states (4 phases with 4 equilibria surfaces)
- 10 possible state transitions
- Only one material!
- (There are more crystal phases we didn't consider.)
Application: States and Primary Variables for Methane Hydrates¶
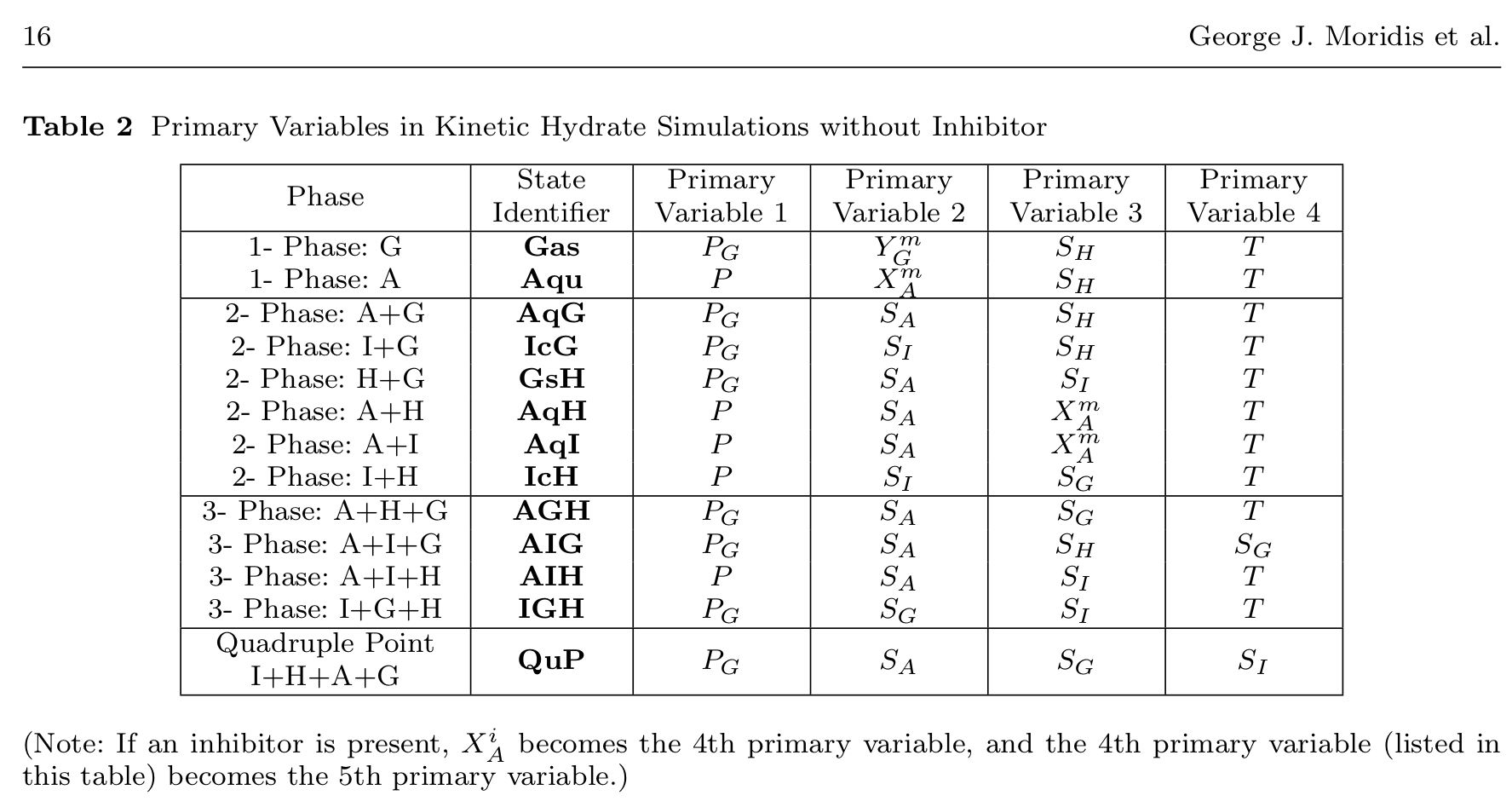
- 3 components: Water, Methane, Salt
- 4 phases: aqueous, gas, water-ice, water-methane hydrate
- 13 states spanning just the regime we care about
- Would need even more states to handle percipitation
How do we solve this better?¶
Take a step back:
- Forget about phases and states.
- Material is a manifold of possible intensive properties.
- It's just empirical data.
- We have observations and expect to stay on these observations.
- We just need any representation of this constraint.
A Constrained Differential Algebraic Equation¶
Solve for $\rho(t), \, h(t), \, p(t),\, \text{and}\, T(t)$ satisfying: \begin{align} \partial_t \rho & = \nabla \cdot \mathbf{k}\nabla p + r & \quad \}\text{mass balance}\\ \partial_t (\rho h-p) & = \nabla \cdot \mathbf{k'}\nabla T + s & \quad \}\text{energy balance}\\ \end{align} such that they lie on the material EOS, \begin{equation} eos(\rho,h,p,T) = 0 \quad \text{or} \quad \{\rho,h,p,T\} \in \{ eos \} \end{equation} We just made the problem harder.
The Archetypical Constraint Problem: The Pendulum¶
Solve for $x(t),y(t)$ stationary on \begin{equation} \mathcal{L}(x,y) = \frac{1}{2}m\left(\dot{x}^2 + \dot{y}^2\right) - m g y \end{equation} subject to \begin{equation} x^2 + y^2 = R^2 \end{equation} Could do spring penalty, Lagrange multiplier, or...
The Lagrangian mechanics formulation lets us introduce a parameterization: \begin{equation} x = R \cos \theta, \quad y = R \sin \theta \end{equation} to plug into the Lagrangian: \begin{equation} \mathcal{L}(\theta) = \frac{R^2}{2} \dot{\theta}^2 + g R \sin \theta \end{equation} The equations of motion in terms of $\theta$ are then: \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\frac{\partial L}{\partial \dot{\theta}} = \frac{\partial L}{\partial \theta} \end{equation}
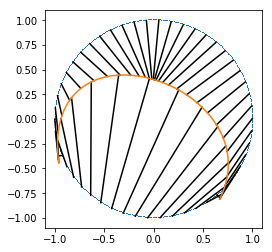
The Pendulum¶
The choice of $\theta$ is arbitrary. There are infinimately choices.
Suppose we only have data: (Imagine the EOS plot I showed earlier.)
import numpy as np
from matplotlib import pylab as plt
%matplotlib inline
theta = np.linspace(-np.pi*1.25,0.25*np.pi,50, dtype=np.float32)
data = np.vstack([np.cos(theta), np.sin(theta)]).T
plt.plot(data[:,0],data[:,1],'+')
plt.axis('square');

We're looking for a mapping from the set of points onto one variable.
Autoencoders¶
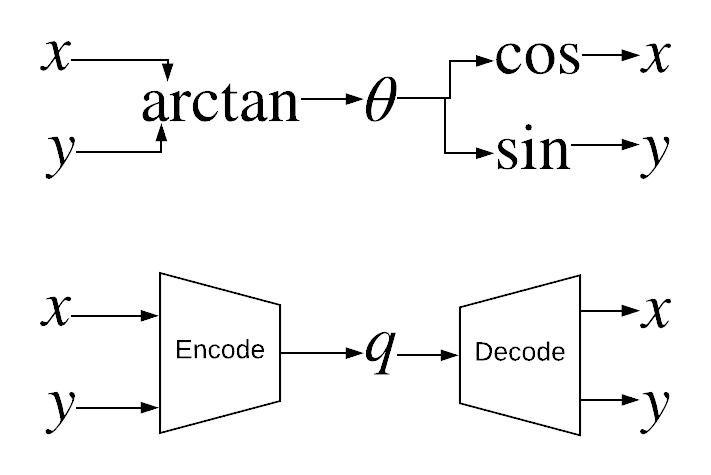
$\theta$ is one instance of an autoencoder. We can look for one without the geometric intuition.
Autoencoders¶
Solve the minimization problem on data set $x$ for parameters $a$
\begin{equation}
\min_a \sum_x \left( x - D(E(x;a);a) \right)^2
\end{equation}
where $q = E(x)$
with len(q)<len(x).
- $q$ represents a point on the Latent Space
- Pick the dimension of $q$ based on prior intuition of the manifold (or tune it)
- Pendulum is a 1D manifold, so look for a 1D $q$
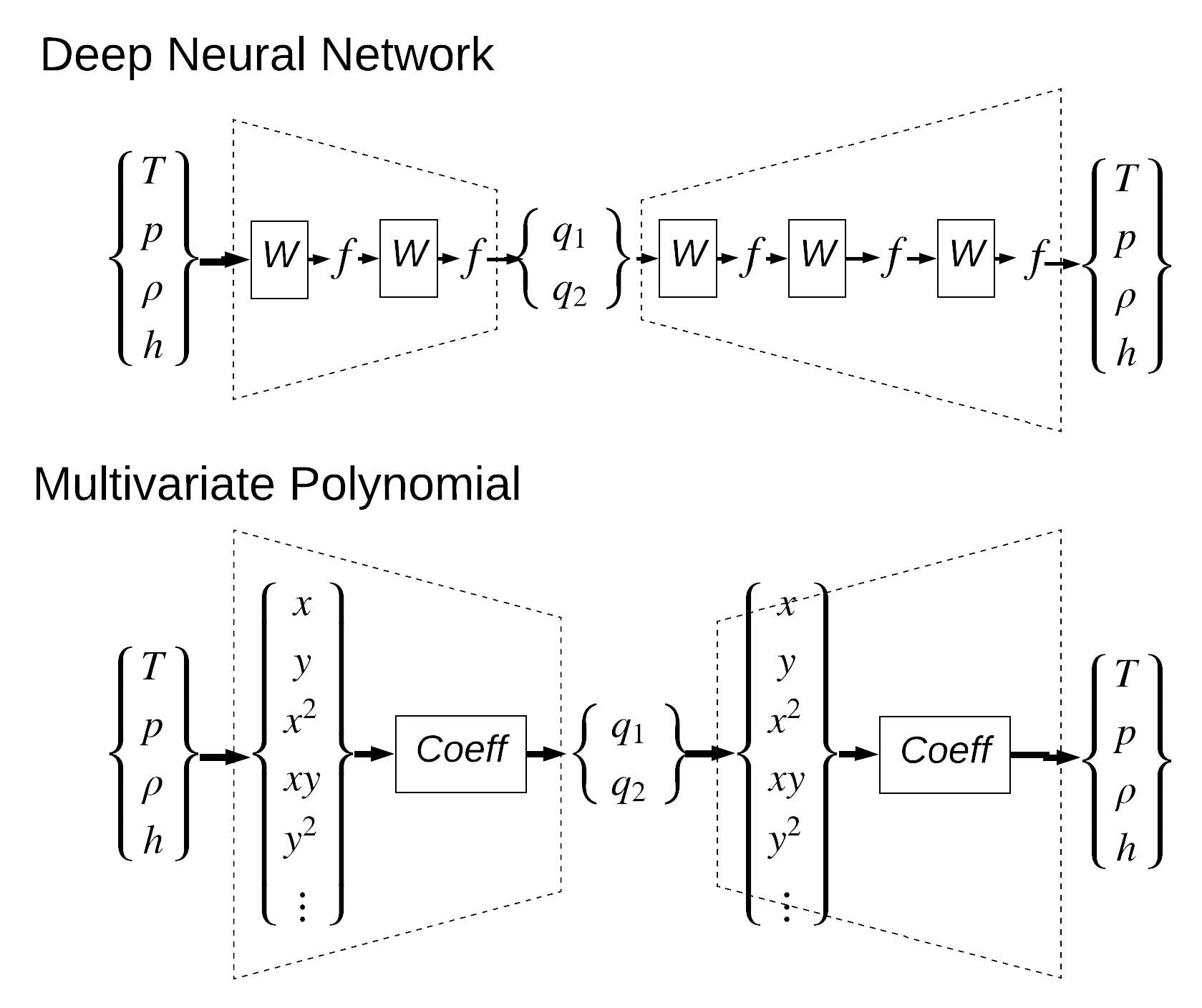
- It's very smooth and continuous so let's use polynomials:
def encode(self, x, name=None):
N_coeff = atu.Npolyexpand( self.size_x, self.Np_enc )
We1 = self._var("enc_W", (N_coeff, self.size_q) )
be1 = self._var("enc_b", (self.size_q,) )
q = tf.matmul( atu.polyexpand(x, self.Np_enc), We1 ) + be1
return tf.identity(q,name=name)
def decode(self, q, name=None):
N_coeff = atu.Npolyexpand( self.size_q, self.Np_dec )
We1 = self._var("dec_W", (N_coeff, self.size_x) )
be1 = self._var("dec_b", (self.size_x,) )
x = tf.matmul( atu.polyexpand(q, self.Np_dec), We1 ) + be1
return tf.identity(x,name=name)
def make_goal(self, data):
pred = self.decode(self.encode(data))
# p = tf.reduce_sum(tf.pow( data - pred, 2) )
p = tf.losses.mean_squared_error(data, pred)
return p
Caveats: Topology¶
- We can't encode a full circle.
- The inner space of this arbitrary architecture is a disk.
- We would need multiple charts to span the circle (more dimensions to $q$ + chart selection), or pick an encoder that maps onto the right topology.
This is why I chopped off the top.
Fortunately EOSes are disks so we don't need to solve this problem.
Solving the Lagrangian: Just do it.¶
Treat the autoencoder the same as $x(\theta)$, plugging in \begin{equation} L(x(q),v(q,\dot{q})) \end{equation} and build the DAE we know from physics: \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\frac{\partial L}{\partial \dot{q}} = \frac{\partial L}{\partial q} \end{equation} where we get the velocity with the chain rule: \begin{equation} v = \frac{\partial x}{\partial q} \dot{q} \end{equation}
Implement it in the TensorFlow syntax (it's a general language!):
def L(i_q,i_qdot): # Input placeholders
x = au.decode(i_q) # Trained decoder
dxdq = atu.vector_gradient(x,i_q) # chain rule
v = tf.einsum("ikj,ij->ik",dxdq,i_qdot) # velocity
L = 0.5*tf.einsum("ij,ij->i",v,v) - g*x[:,1] # action
return x,v, tf.expand_dims(L,-1) # return TF graphs
Then plug it into a Runge Kutta (trapezoidal) to solve with Newton's method: \begin{equation} \frac{\partial L}{\partial \dot{q}}_i - \Delta t \frac{\partial L}{\partial q}_i = \frac{\partial L}{\partial \dot{q}}_0 + \Delta t \frac{\partial L}{\partial q}_0 \end{equation}
Solving the Lagrangian: Just do it.¶
Then we just build the expressions we need:
o_x,o_v,Li = L(i_qi,i_vi)
dLi_dv = atu.vector_gradient(Li,i_vi)
dLi_dq = atu.vector_gradient(Li,i_qi)
descritize in time with a one-step implicit Runge-Kutta
lhs = dLi_dv - Dt * aii * dLi_dq
rhs = dL0_dv + Dt * (1.0-aii) * dL0_dq
and take the tangents we need:
KV = atu.vector_gradient(lhs,i_vi)
KQ = atu.vector_gradient(lhs,i_qi)
Ktot = Dt*KQ + KV
Then we do a Newton's method loop:
# Encode an initial condition
theta_init = - 0.5*np.pi/2.0
x_init = np.array([[np.cos(theta_init),np.sin(theta_init)]])
q_0[:] = au.o_q.eval(feed_dict={au.i_x:x_init})
v_0[:] = 0.0
for it in range(1000):
# Macro for tensorflow call
ev = lambda x : sess.run(x,feed_dict
={i_qi:q_i,i_q0:q_0, i_vi:v_i, i_v0:v_0})
rhs_0 = ev(rhs)
# Newton's method loop
for k in range(10):
# Assemble
K_k,lhs_k= ev(Ktot), ev(lhs)
R = rhs_0 - lhs_k
# Solve for update to qdot
Dv = np.linalg.solve(K_k[0,:,:], R[0,:])
v_i[:] += Dv
# Use second-order RK formula to update q
q_i[:] = q_0 + ev(Dt)*((1.0-aii)*v_0 + aii*v_i)
n = np.linalg.norm(Dv)
if n<2.0e-7: break
v_0[:] = v_i[:]
q_0[:] = q_i[:]
# Saving data requires calling the decoder
series_x.append(ev(o_x)[0,:])
series_v.append(ev(o_v)[0,:])
Copy-and-paste of the implementation!
Solutions of the Pendulum¶
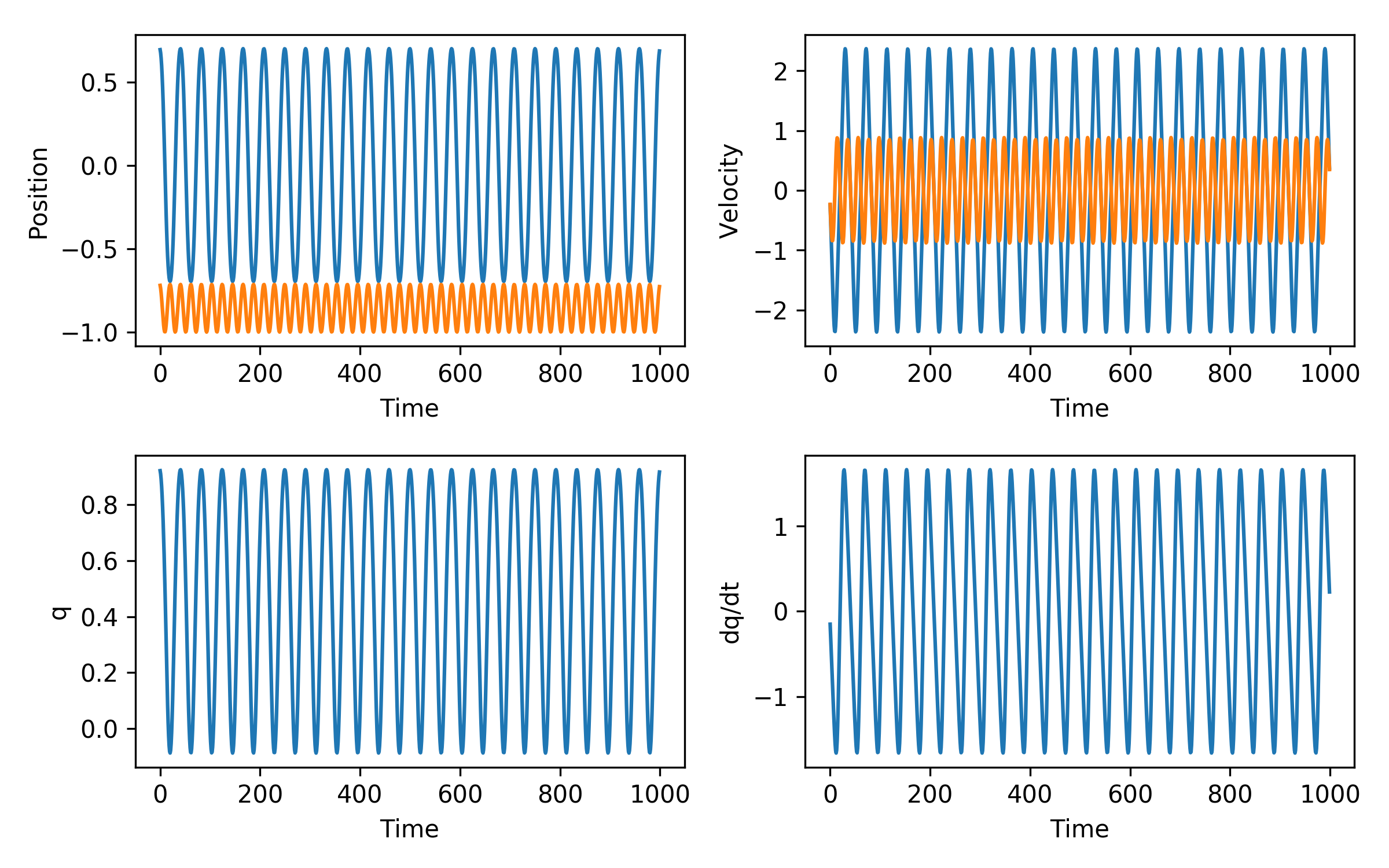
- We solved for $q(t)$ and $\dot{q}(t)$
- Decode $x,y$ and $v_x,v_y$ as a post-process
Back to Multiphase EOS¶
Solve for $q_1(t)$ and $q_2(t)$ such that: \begin{align} \partial_t \rho(q_1,q_2) & = \nabla \cdot \mathbf{k} \nabla p(q_1,q_2) + r \\ \partial_t \rho h(q_1,q_2)-p & = \nabla \cdot \mathbf{k'}\nabla T(q_1,q_2) + s \end{align} where $\rho(q_1,q_2)$ etc. are the back of an autoencoder: \begin{equation} \left\{ \begin{array}{c} T\\ p\\ \rho\\ h \end{array}\right\} \rightarrow E \rightarrow \left\{ \begin{array}{c} q_1\\q_2 \end{array} \right\}\rightarrow D \rightarrow \left\{ \begin{array}{c} T\\ p\\ \rho\\ h \end{array}\right\} \end{equation} Using the autoencoder to automatically remove the local constraint: \begin{equation} eos(D(q_1,q_2)) = 0 \, \forall \,q_1,q_2 \end{equation}
Only training the material representation, not the balance laws.
Solving the equations:¶
First, we had a constrained DAE: \begin{align} \frac{\mathrm{d}}{\mathrm{d}t} m(T,p,\rho,h) &= r(T,p,\rho,h)\\ eos(T,p,\rho,h) &= 0 \end{align} with no good representation of $eos$ everywhere.
The autoencoder parameterizes the constraint : \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t} m(D(q)) = r(D(q)) \end{equation} Apply a Runge-Kutta to get: (BW Euler) \begin{equation} 0 = R(q^i) = m(q^{i}) - m(q^{0}) - \Delta t \, r(q^i) \end{equation} By design $R(q)$ is smooth enough to solve with Newton's method: \begin{equation} \frac{\partial R}{\partial q} \Delta q^{k+1} = R(q^k) \end{equation} (Well, it's a hard nonlinear problem, but a smooth one!)
Methodology¶
- Make a database of $T,p,\rho,h,X_1,...$
- Piece together empirical fits for each phase from literature
- (Experimental data in the future)
- Normalize (and $\log(p)$) the database, shuffle it
- $\log(p)$ distributes the low-$p$ phases evenly w.r.t. high-$p$ phases
- Train the autoencoder
- Don't use phase labels
- Batch test architectures
- Load the models and generate physics code
- Verify and grade architectures on tests
- Need more than autoencoder mean-squared-error
- Differentiability and numerical stability in simulation
- Evaluation speed (billions of times in a simulation!)
- Pick best one to package into production code
Can be automated after step 1.
Model Architectures¶
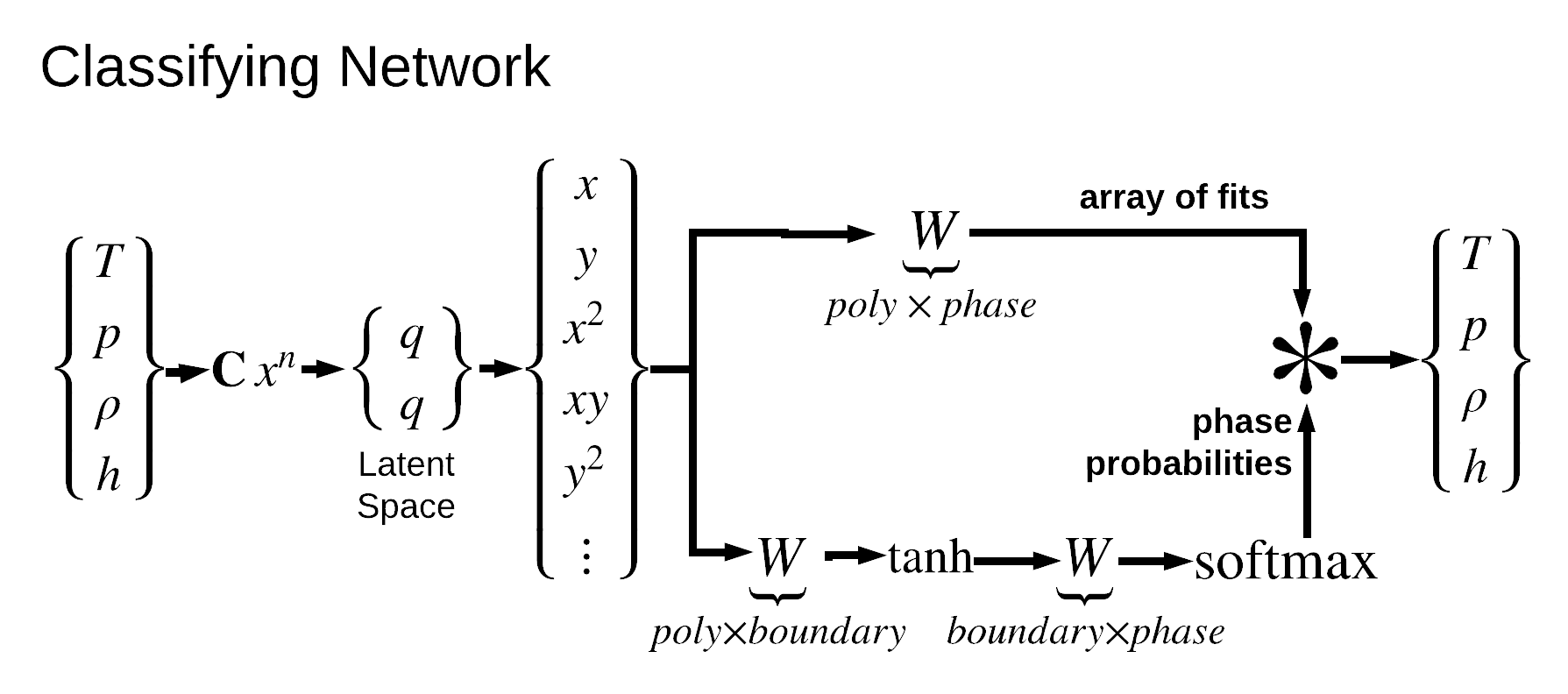
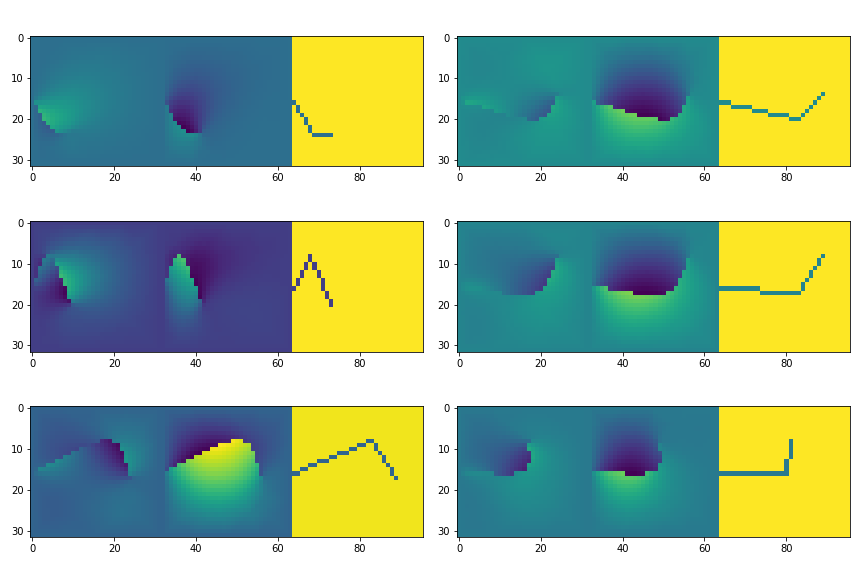
Feature Identification¶
Compare to the original labels:¶
$T,p,rho,h$ are smooth in $q_1,q_2$¶
IFrame("slides/water_slgc_logp_64_qq_plots.html",1200,650)
Testing the Method¶
Three different extents:
- Linear Equation of State
- Test!
- Reduces to single phase Darcy's law problem (slide 1)
- $ p = 10^5+[-10^3, 10^3] Pa,\quad T = [ 19, 21 ] ^o C$
- Water Liquid-Gas Regime
- One phase boundary
- $ p = [100,5\times 10^5] Pa, \quad T = [274,594] K$
- Water Solid-Liquid-Gas-Supercritical Regimes
- No linear mapping to latent space
- Entire span
- $ p = [6\times 10^{-6},3\times 10^8]Pa, \quad T = [150,1000] K $
Testing the Method¶
Multiple test problems that move through the phase diagram:
class Transition_L2G():
t_max = 1000.0
initial = dict(T=350,p=5.0e5)
params = dict(k_p=1.0e-4,k_T=1.0e4)
@staticmethod
def schedule(sim,t):
sim.set_params(T_inf=350,p_inf=5.0e3)
class Cycle_sgclg():
t_max = 5000.0
initial = dict(T=250,p=5.0e3)
params = dict(k_p=1.0e-4,k_T=1.0e3)
@staticmethod
def schedule(sim,t):
if t<1000.0:
sim.set_params(T_inf=800,p_inf=5.0e4)
elif t<2000.0:
sim.set_params(T_inf=800,p_inf=3.0e7)
elif t<3000.0:
sim.set_params(T_inf=400,p_inf=3.0e7)
elif t<4000.0:
sim.set_params(T_inf=400,p_inf=5.0e3)
...
Basic verfication:¶
IFrame("slides/water_linear_simulation_tests.html",1200,650)
Running the tests on everything:¶
IFrame("slides/water_slgc_logp_64_simulation_tests.html",1200,650)
Grading the Architectures¶
Analyze the training state and all of the test cases:
| . | name | train_goal | succ | min_err | max_err | run_time |
|---|---|---|---|---|---|---|
| x | Classifying_2,4,12,24,sigmoid_0 | 3.14e-04 | 3 | 2.61e-03 | 3.90e+04 | 138.3 |
| x | Poly_3,7 | 5.00e-05 | 2 | 6.55e-05 | 1.45e-01 | 259.3 |
| x | Classifying_2,6,18,36,sigmoid | 1.39e-05 | 2 | 6.21e-10 | 1.67e-01 | 377.0 |
| x | Deep_2,(12),3,(12,12,12) | 2.54e-05 | 2 | 7.63e-06 | 2.09e-01 | 59.6 |
| x | Deep_1,(12),1,(12,12,12) | 2.92e-05 | 2 | 1.67e-08 | 3.38e+04 | 54.7 |
| x | Classifying_2,1,12,24,sigmoid | 8.82e-05 | 3 | 1.05e-05 | 4.05e+04 | 36.9 |
| x | Classifying_2,4,12,24,sigmoid | -1.00e+00 | 2 | 1.22e-09 | 1.51e-01 | 158.3 |
| x | Classifying_2,5,12,24,sigmoid | 1.37e-05 | 3 | 2.44e-05 | 4.03e+04 | 227.5 |
| x | Classifying_2,3,12,24,sigmoid | 1.75e-05 | 2 | 9.05e-06 | 1.26e-01 | 88.4 |
| x | Deep_1,(),1,(12,12,12) | 7.31e-02 | 2 | 4.27e-06 | 4.08e+03 | 71.9 |
| x | Poly_2,7 | 1.12e-04 | 3 | 8.47e-09 | 4.03e+04 | 253.6 |
| x | Classifying_2,6,12,24,sigmoid | 6.16e-05 | 2 | 4.56e-03 | 4.05e+04 | 314.2 |
| x | Classifying_2,6,24,48,sigmoid | 2.83e-06 | 2 | 6.34e-10 | 1.70e-01 | 368.4 |
Only passes my tests on the linear EOS:
| . | name | train_goal | succ | min_err | max_err | run_time |
|---|---|---|---|---|---|---|
| o | Poly_1,1 | 3.53e-06 | 1 | 2.54e-12 | 2.14e-06 | 0.5 |
Still debugging...
Conclusions¶
- Deep learning to replace and improve hand-baked equations and algorithms
- Can do unsupervised phase classification
- Only training the material representation, not the balance laws
- Extend to more complicated materials
- Put into a flow simulation
- Close loop on testing with reinforcement learning
Goal: Automate integration of data analysis into simulation
Future Work¶
This is a proof of concept. The motivation is encoding more complicated states and solve intractable physics on those latent spaces:
Fracture simulations with strain \& fracture energies, etc.
Can we find a Lagrangian stationary path in the compressed space?
Thank you¶
Outro¶
Where do we go from here with machine learning?
Models are snippets of computer programs.
Which parts of your program can you get the computer to write?