rajiv govindjee
Hi! My website is always a work in progress, but feel free to take a look around.
I recently completed a master's degree in Aerospace Engineering at the University of Michigan, Ann Arbor; I did my undergrad in Electrical Engineering & Computer Science at UC Berkeley, with a minor in Mechanical Engineering.
My interests are mostly in robotics, controls, autonomy, and safety-critical embedded systems. I particularly (but not exclusively) enjoy working on air and space robotics.
I've worked in commercial aircraft (Boeing), consumer electronics (Apple), drone delivery (Wing), and autonomous vehicles (Zoox); I'm always excited to solve hard engineering problems wherever I can find them.
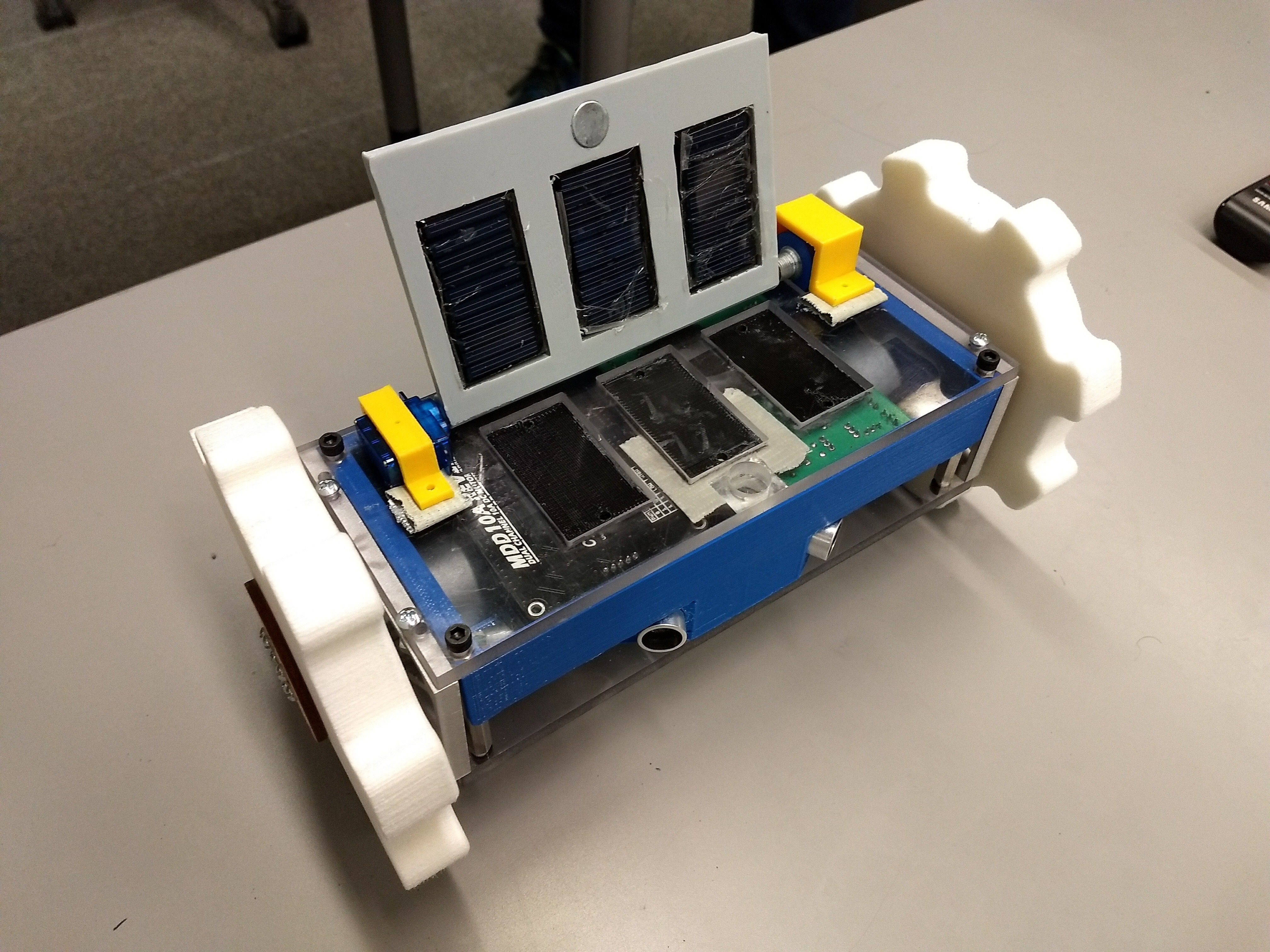
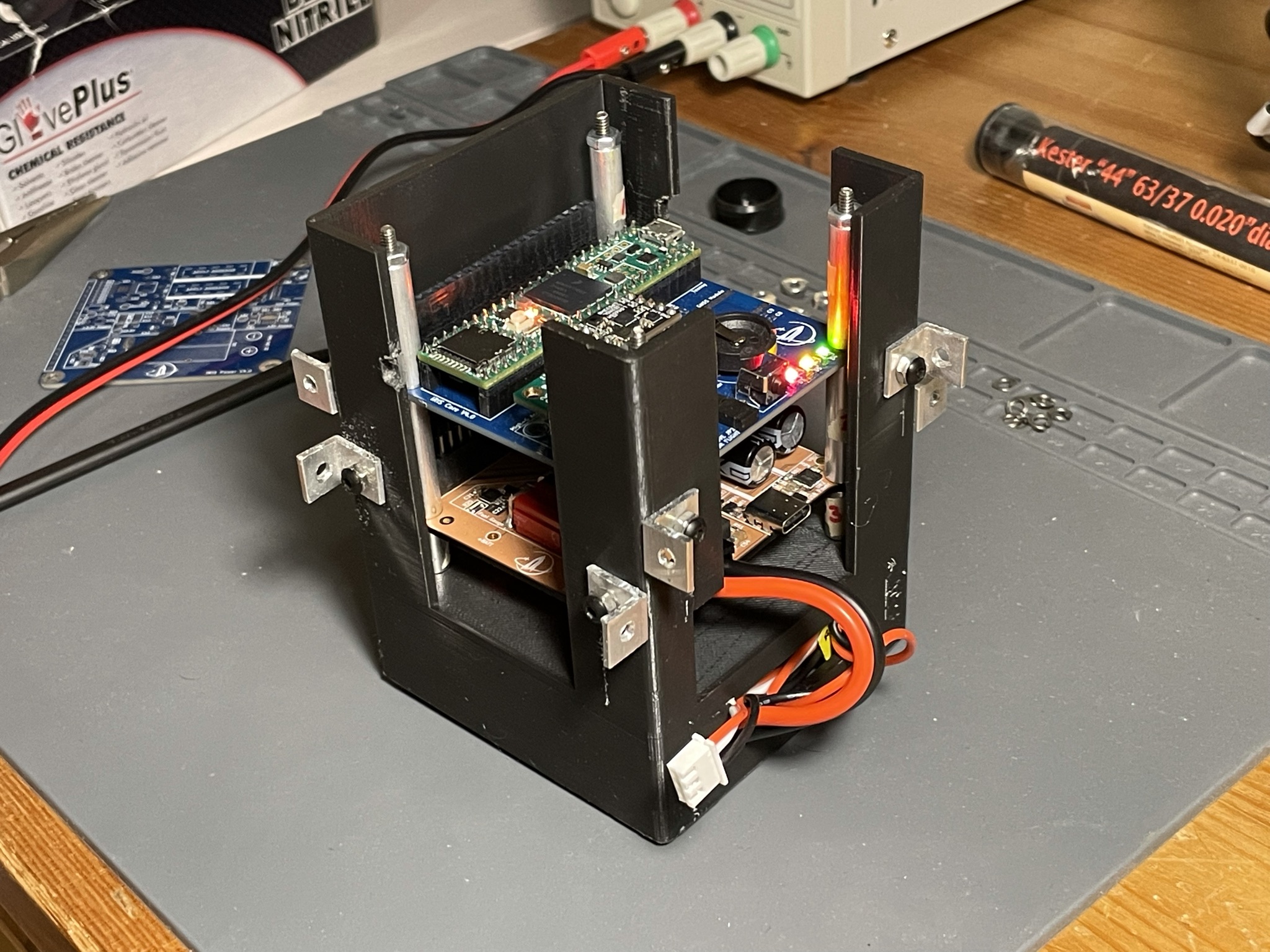
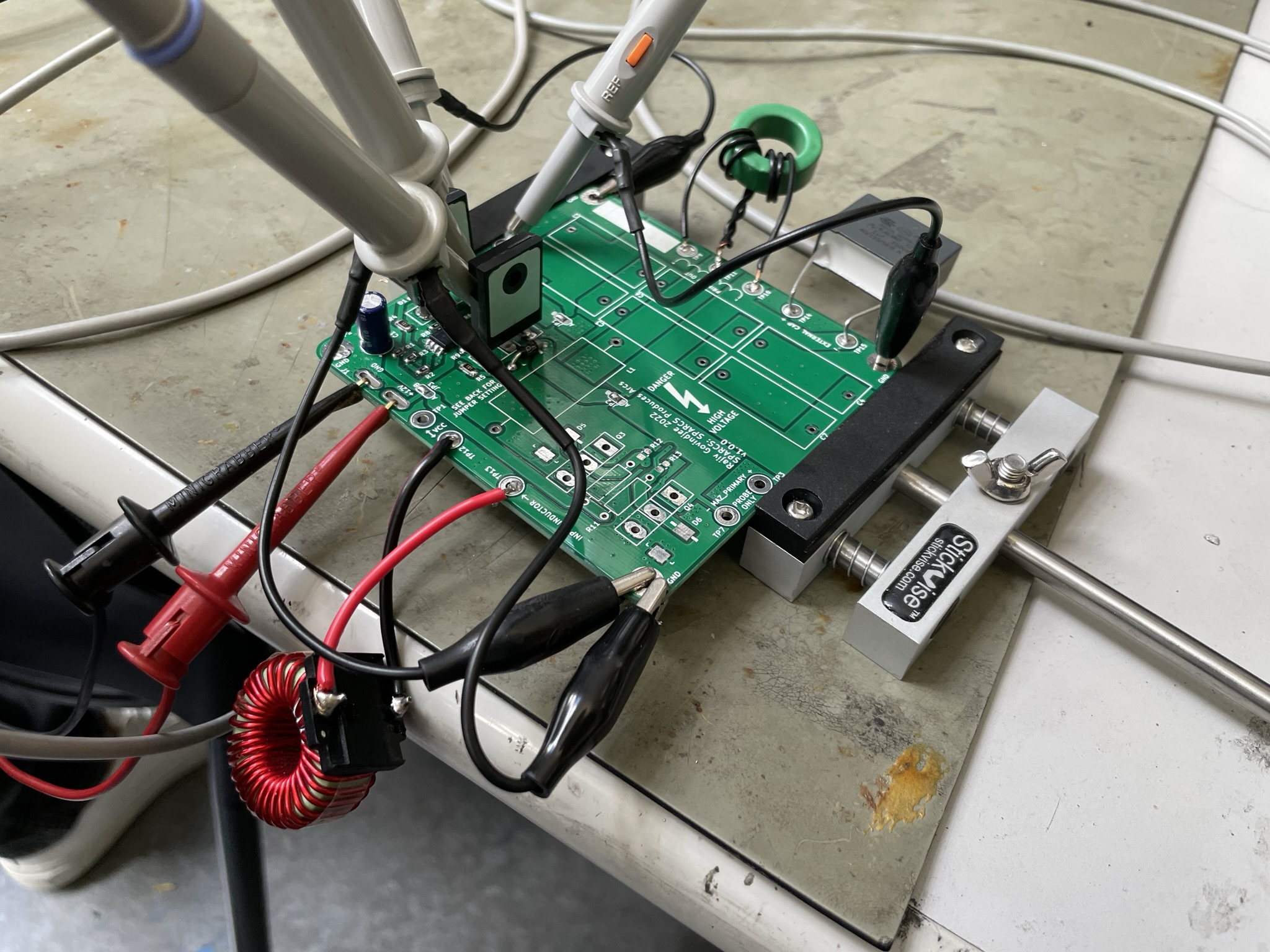
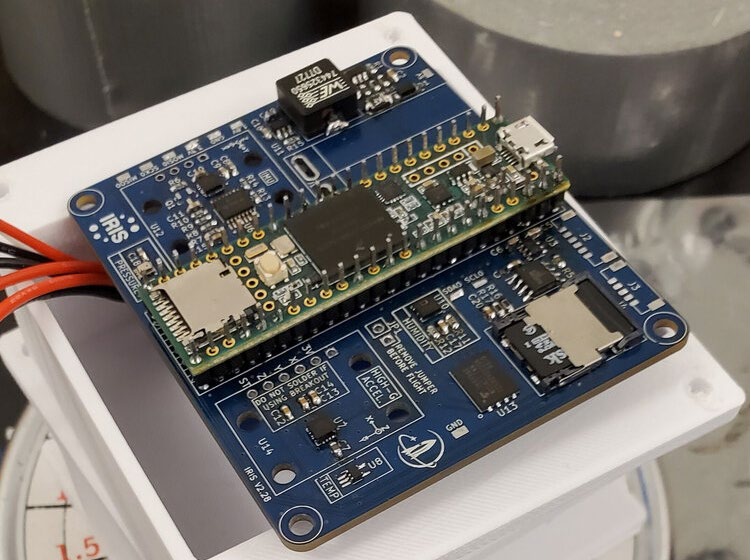
Over the years, I've worked on several fun projects in rocketry, robotics, electronics, and more. The sample below comes from my classes, clubs, and personal projects.
Outside of work, I enjoy cooking, baking, climbing, hiking, and wilderness backpacking.
If you'd like to know more about me, you can find my resume here or send me a message at rajivg 'at' berkeley.edu; I also have a LinkedIn!

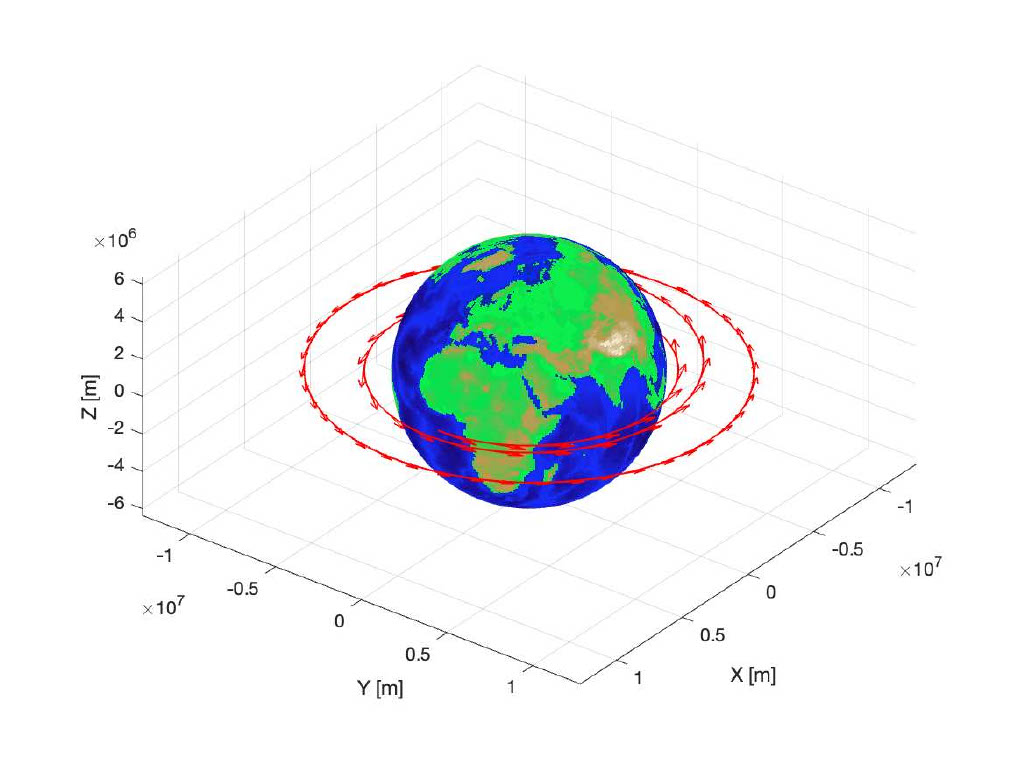
rocketry




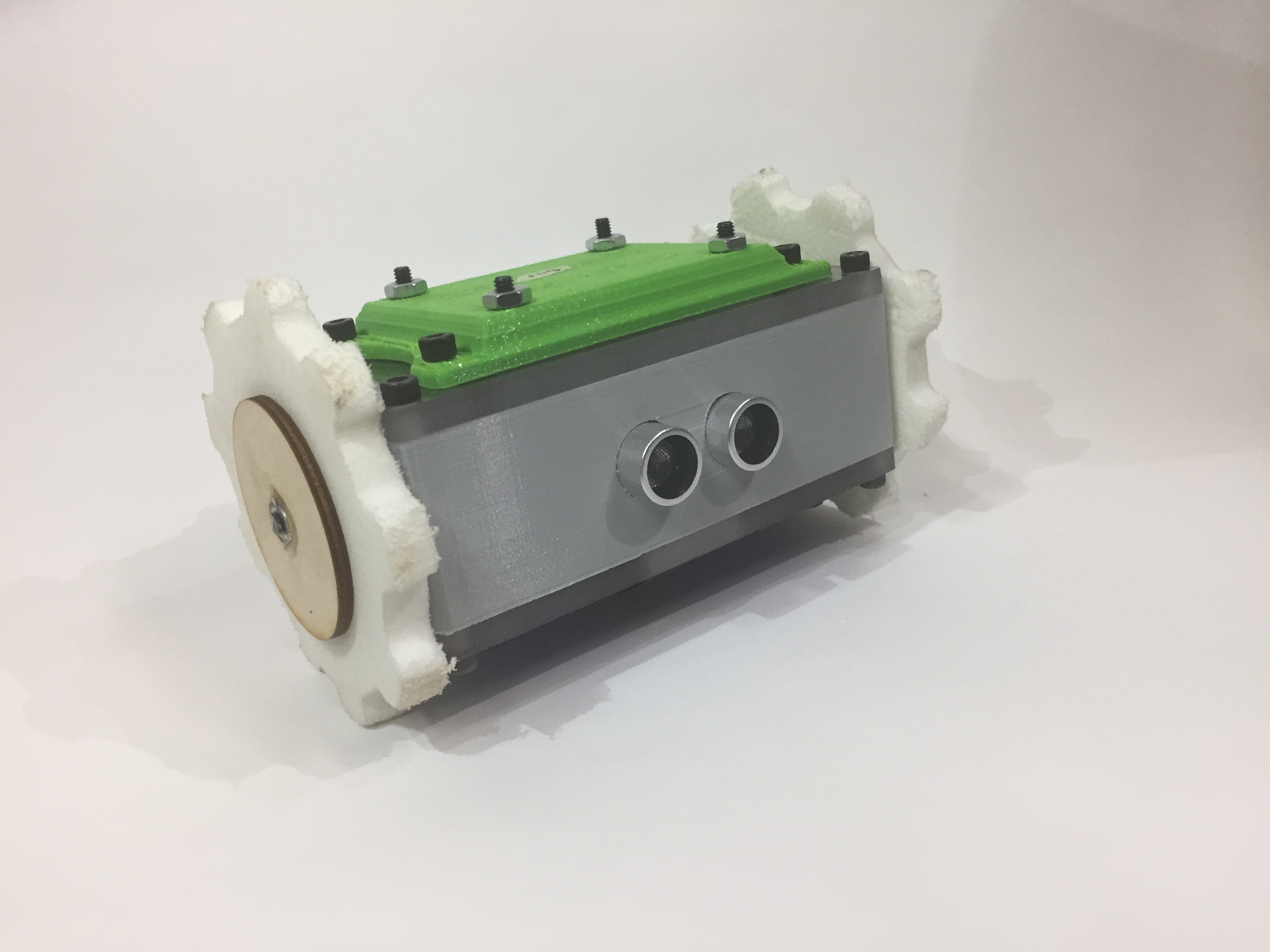
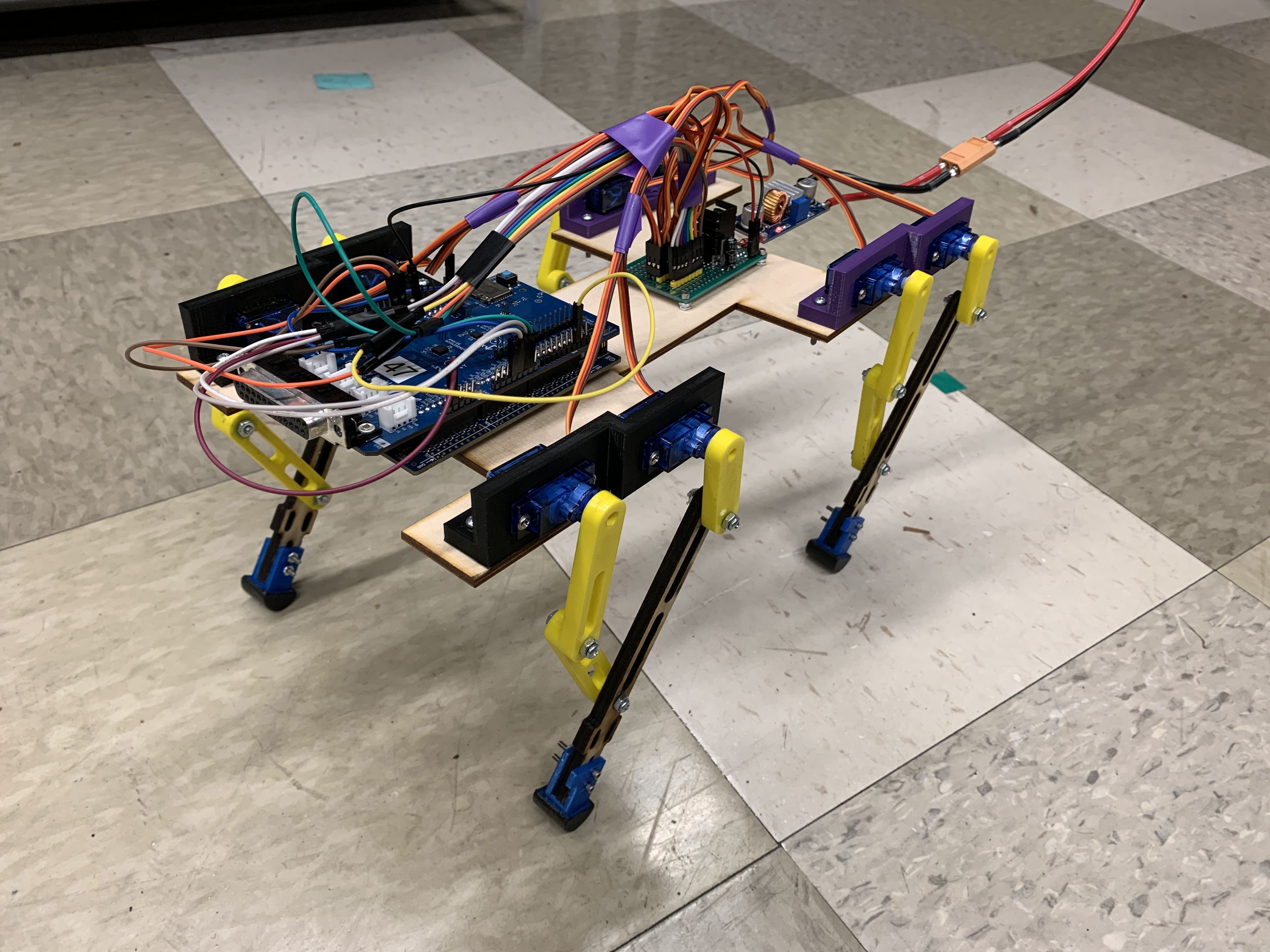
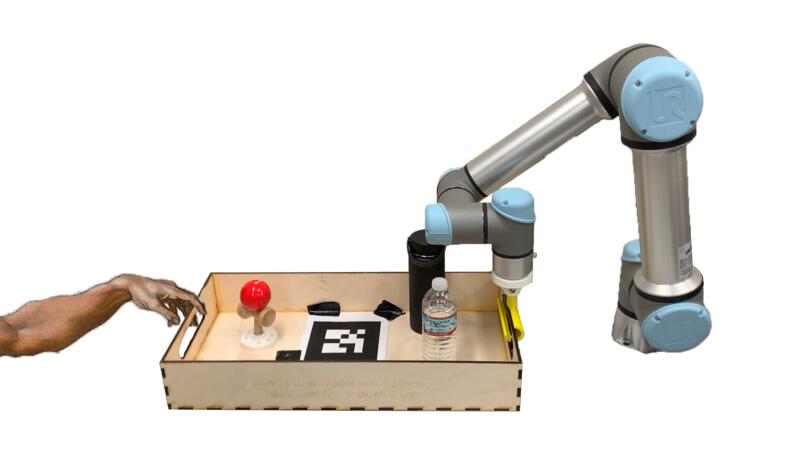
robotics and control
electronics
nature photography






manufacturing