Center for Integrate Biology and Education Research
Professor Robert Full, Post-doctorate Chen Li
Professor Robert Full, Post-doctorate Chen Li
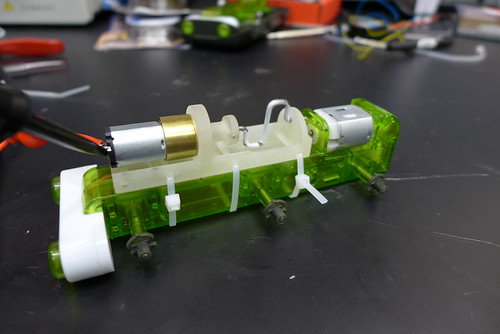
In this research project, I am prototyping electromechanical models to test hypotheses about insect dynamics. In particular, we are interested in studying the righting of winged insects.
Current poly-pedal robots can have broad applications in search and rescue and environmental monitoring, but these robots have no mechanism for righting themselves after being overturned. As a stepping stone for implementing these dynamic capabilities, we want to first study the underlying biological principles to find insights that can be adapted in our engineering solutions.
For this research project, I was responsible for the electromechanical design and microcontroller programming.
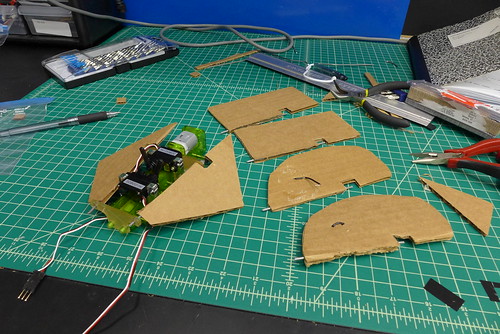
Using modular laser cut pieces, different parameters such as the size, shape, and angle of the wings can be quickly adjusted.

Interchangeable front and back wing mounts to adjust wing angle.
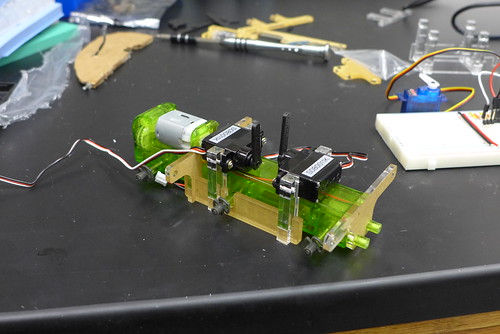
The wings are actuated through a simple two bar linkage with a servo.

Previous design iterations