ME 135/235: Microprocessor-Based Design of Mechanical System
Spring 2013
Spring 2013
Team Members: Susie Kim, Samuel Yoon, Jacob Vega
My Responsibilities: fabrication, electronics, LabVIEW & Arduino programming
The primary focus of this course is a semester long design project. For our group, we implemented a two wheeled, remote controlled, self balancing robot.

Because the focus of the class is on the microcontroller programming, we designed our hardware to be as easy as possible to manufacture.
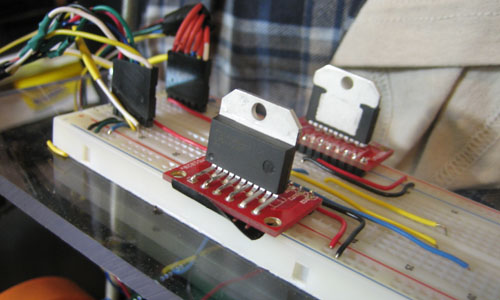
Sampled H-bridges from TI.
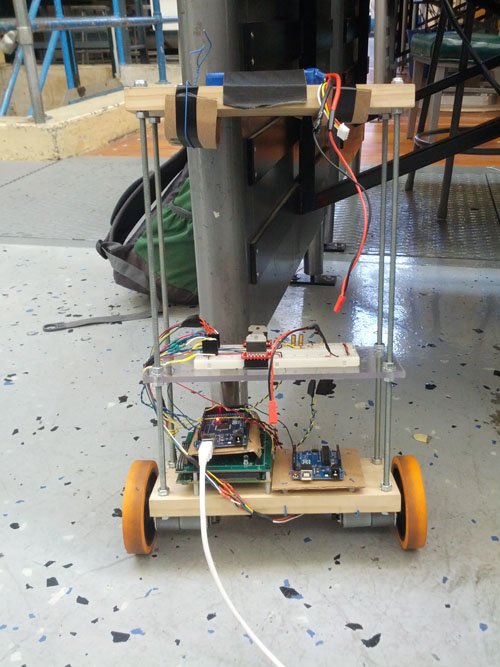
Tyrone! with counterweight (Ti-84 graphing calculator) removed.
Future improvements:
- Introduce x and x_dot dependency in the PD controller with encoder feedback
- Incorporate user control, either directly through serial with xbee, or with Bluetooth and an Android device
- Forward and backward navigation, and turning in place