
I currently lead research and development for perception and modeling at Aescape.
As a Postdoctoral Researcher in the GRASP Laboratory at the University of Pennsylvania, I worked to advance our understanding of machine perception and animal locomotion. I created deep learning and computer vision tools for multi-view animal pose estimation, tracking, and ReID with Marc Schmidt and Kostas Daniilidis.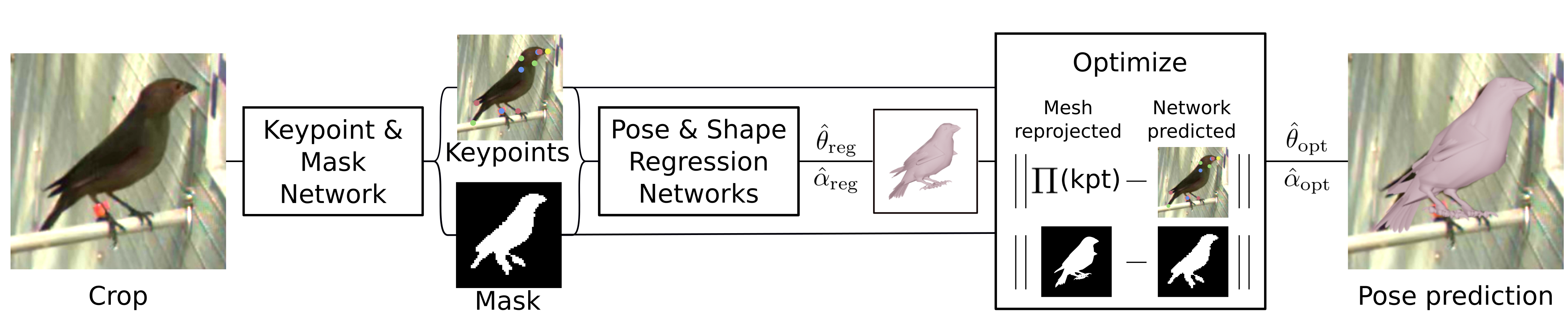
I also worked as a Postdoctoral Scholar at UC Davis with Stacey Combes to investigate the biomechanics and behavior of maneuvering flight and obstacle avoidance in bees. I performed experiments to measure bees’ preferences and flight performance when presented with choices between open, windy, and cluttered environments, and I developed deep learning algorithms for tracking 3D wing and body motion over hundreds of thousands of frames of high speed video.
During my PhD in Integrative Biology at UC Berkeley, where I was advised by Robert Dudley, I used hummingbirds as a model system to understand how locomotion through cluttered environments influences flight morphology, behavior, and performance. By examining the relationships between flight maneuvers, learning, and whole-organism performance metrics, I worked to extract principles that will lead to new ecological and evolutionary hypotheses and to implement these principles to improve the locomotion capabilities of bio-inspired robots in cluttered environments. My graduate work at UC Berkeley was funded by a Graduate Research Fellowship from the National Science Foundation and a CiBER IGERT Traineeship, and was recently featured in National Geographic Magazine.

Throughout my research I have developed computational tools to facilitate high throughput data collection and analysis. I have implemented techniques from deep learning and computer vision to automatically track and analyze hummingbird and bee motion in 3D using multi-camera high speed video.
Contact: marc.badger@gmail.com
